
Sample Preparation Laboratory Teleoperations
August 2015 - May 2016 • Product/Procedure Design, Prototyping
The project was created by myself and three other engineering students as part of a senior design project at Idaho State University in conjunction with Idaho National Laboratory. The project relied on the integration of kinematics, electronics, material sciences and radiation physics for the design of a system for use in a nuclear hot cell environment.
The project is an important step for the nuclear industry as it showed the applications of new technology and its capability to handle radiation and withstand such environments. The demonstration has sparked interest, not only at Idaho National Laboratory but at other nuclear facilities as well.
ABSTRACT
The Material Fuels Complex (MFC) at the Idaho National Laboratory (INL) is a cutting-edge research center with capabilities for nuclear energy research that are non-existent in other laboratories. The conceptual design process for the new Sample Preparation Laboratory (SPL) has presented INL with the opportunity to incorporate new technologies into existing operations. As part of the mission need, SPL shall include post-irradiation examination capabilities. Most sample preparation and examination in a hot cell is currently performed using master-slave manipulators. These instruments are large, expensive, and require specialized training. Therefore, INL has to investigate new, less expensive, space-saving, and tele-operational technologies to replace the master-slave system.
Current design uses commercially available products integrated together for a robust near autonomous design. A robotic arm is the base of the design with various specialized vision systems, such as Machine Vision and room cameras, to allow complete robot control with the ability for human input where needed.
The final result was a fully functioning design of an autonomous and tele-operated system that will allow for the loading and unloading of radioactive samples without harm, both physically and radiologically, to operators.
COMPONENTS
Universal Robotics UR-5
The UR-5 was chosen for this project based on its degrees of freedom, which also inlcuded the ability to move 360° at each joint. This gave the ability to complete the task smoothly. The UR-5 also allowed for ease of programming and very high precision and accuracy which was important for this type of application.


Cognex In-Sight Micro 1100
The Cognex Machine Vision camera system was used to assist the autonomous mode of the robotics system. The machine vision camera can tell the orientation of an object that is programmed into the system. This also assisted in the off normal situtation (dropping of a sample) as it is able to scan areas and find the sample.
Room Cameras
Room cameras were used to allow the operator to view the entire process from a safe location. Cameras used in this application were, RVision SEE HP pan tilt units. Two of these cameras were used to give the operator the best viewing possible, being pan tilt the operator has more control over the viewing area that is seen. The use of room cameras also made it so that the use of expensive windows were not needed in the cells.


POSTER
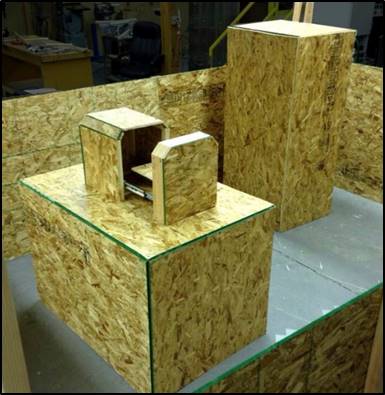
MOCK-UP PROGRESSION
Throught the process it was found to be important that a 1:1 scaled mock-up be used to help with robot size as well as for demonstration purposes. This is a progression of the mock-up from computer simulation to actual construction of a cell.
Simulation of UR-5
(animation not representative of actual movements)

Cardboard Mock-Up
December 2015
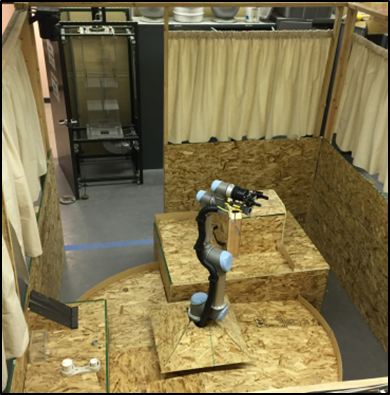
Plywood Mock-Up w/ Robotic Arm
April 2016

Top Layout of UR-5
Plywood Mock-Up
February 2016

Painted Plywood Mock-Up w/ Robotic Arm
May 2016